home positions
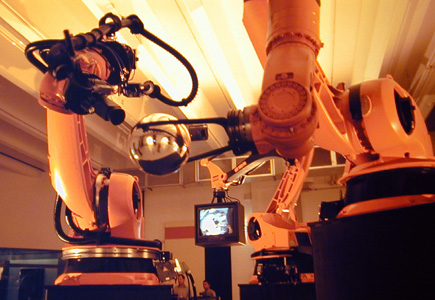
Roboterinstallation (2000)
Als Auftragsarbeit für den Roboter Hersteller KUKA wurde in Augsburg
home positions Präsentationsraum auf dem Werksgelände
konzipiert. Drei Roboter-Prototypen wurden auf Sockel aufgebaut und mit
jeweils einem eigenen Werkzeug ausgestattet - Videocamera, Monitor und
einer verspiegelten Kugel. Die Präzision der Maschinen nutzend wurde
die Installation zu einer vielfältigen Interaktion zwischen den Medienwerkzeugen.
So entstanden gezielte Rückkopplungen zwischen Kamera und Monitor,
spärischen Perspektiven durch das Umkreisen der Spiegelkugel und
vielfältige aus der Bewegung kommende Interaktionen zwischen den
choreographierten Maschinen.
Ein Projekt von robotlab: http://www.robotlab.de